ラズパイ側の環境構築
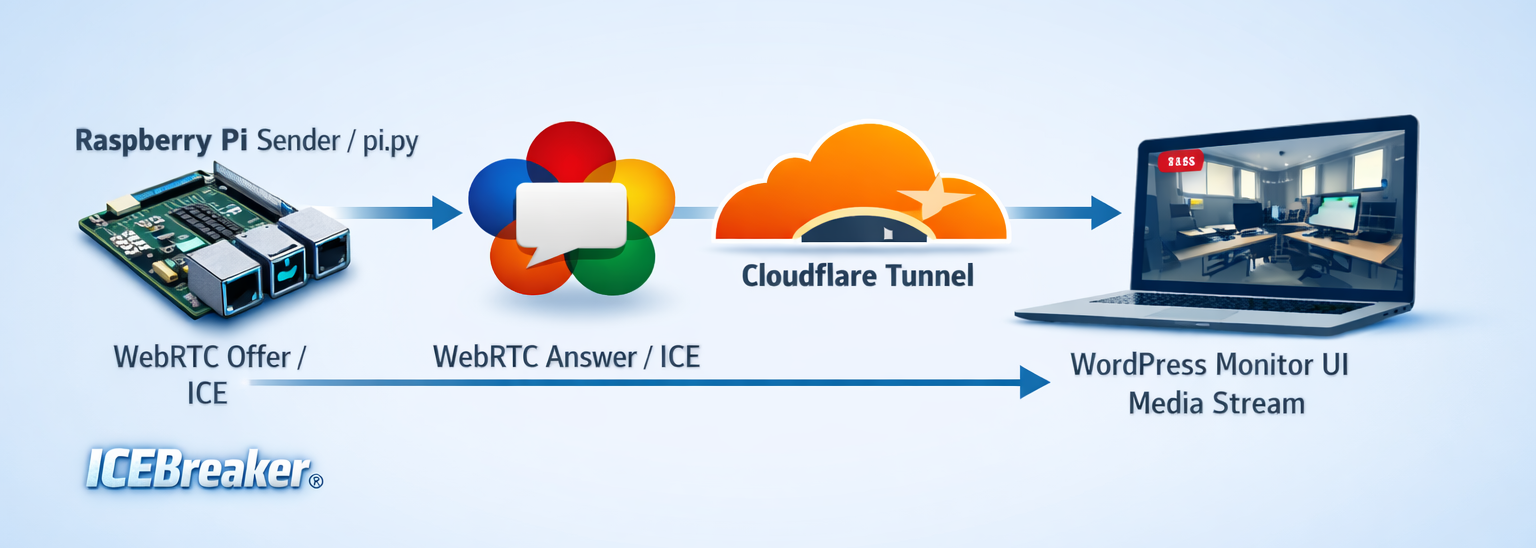
システム構成はこちらをご参照ください。
このセクションの目的
WebRTCライブラリ”aiortc”の使用環境をPyAV なしで構築する
仮想環境の構築
適当に作業フォルダを作成する
$ mkdir 4GPi-iceBreakeraiortcライブラリはgithubからソースコードでビルドのためpython3.11が必要です。
Bulleseyeはpython3.9標準なので、ラズパイのOSはBookwormがおすすめ。
もし、pythonのバージョンが古い場合、以下よりインストールしてみてください。
$ sudo apt install python3.11 python3.11-venv python3.11-dev仮想環境にしたいフォルダに移動して仮想環境を作ります。
$ cd 4GPi-iceBreaker
$ python3.11 -m venv venv仮想環境を有効化します。
$ source venv/bin/activate仮想環境を終了する時
$ deactivatePythonコードでWebRTCを動かすモジュールを入れる
$ sudo apt update
$ sudo apt upgrade$ pip install --upgrade pip setuptools wheel aiortc とaiohttp とwebsocketsをインストール
$ pip install aiortc
$ pip install aiohttp
$ pip install websockets依存ファイルをインストール
sudo apt install -y \
libavformat-dev \
libavcodec-dev \
libavdevice-dev \
libavutil-dev \
libswscale-dev \
libswresample-dev \
libavfilter-dev \
libopus-dev \
libvpx-dev \
pkg-config \
python3-dev \
cython3 \
libatlas-base-dev \
libjpeg-dev \
libpng-dev
numpy (Bookworm なら問題なし)とopencvをインストール
$ pip install numpy==1.26.4$ pip install opencv-python-headless$ pip listで確認